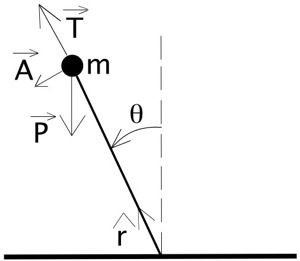
SCHÉMA D’UN PENDULE SIMPLE INVERSÉ :
Finalement, si le pendule se trouve dans une position d’équilibre stable et, au contraire, si
le pendule se trouve dans une position d’équilibre stable et, au contraire, si le pendule se trouve dans une position d’équilibre instable.
le pendule se trouve dans une position d’équilibre instable.
ÉTUDE DES POINTS D’ÉQUILIBRE :
Ce schéma représente un pendule simple inversé, c’est à dire une barre rigide fixée à un socle à son extrémité inférieure et possédant une masse liée à son extrémité supérieure.


Pour déterminer les points d’équilibre d’un pendule simple inversé (ou d’un pendule simple, le raisonnement étant le même) il faut écrire l’énergie potentielle du système qui est :
et on trouve deux solutions à cette équation. La première est  et la deuxième est
et la deuxième est .
.
Il ne reste plus qu’à vérifier si ces points sont des points d’équilibre stable ou instable. Pour cela on dérive une seconde fois par rapport à :
:
(1)
(2)
On regarde alors le signe de cette dérivée seconde pour chacune des solutions. Si le signe est positif, le point d’équilibre est stable, et s’il est négatif, le point d’équilibre est instable. On trouve :

(3)


et
En mécanique, l’étude du mouvement d’un système débute généralement par l’application de la seconde loi de Newton. Cette loi vérifie l’égalité :
PORTRAIT DE PHASE :
Pour comprendre la dynamique d'un système il suffit tout simplement d'étudier son portrait de phase.
Un portrait de phase est un graphique représentant la vitesse en fonction de la position, il faut donc trouver une équation de la forme :
Par analyse dimensionnelle on introduit une pulsation
qui a pour dimension l’inverse d’un temps. Cette pulsation est caractéristique au système. En effet, est indépendant du système car  est une constante mais
est une constante mais est la longueur propre au pendule donc une longueur caractéristique.
est la longueur propre au pendule donc une longueur caractéristique.
On peut donc réécrire l’équation (6) :
avec la dérivée première par rapport au temps de
la dérivée première par rapport au temps de donc la vitesse angulaire du pendule.
donc la vitesse angulaire du pendule.
Somme des forces :

avec l’accélération tangentielle du système,
l’accélération tangentielle du système, la masse du système (ici la masse du pendule) et
la masse du système (ici la masse du pendule) et la somme des forces extérieures appliquées au système.
la somme des forces extérieures appliquées au système.
On applique donc cette loi à notre système qui ne subit que deux forces extérieures : son poids et la tension de la barre
et la tension de la barre , d’où :
, d’où :
(4)
On simplifie cette équation en faisant le produit vectoriel de chaque membre avec :
:

Mais on peut relier l’accélération tangentielle à l’accélération angulaire par
par , d’où :
, d’où :

On a bien réussi, par un changement de variables, à écrire une équation sans dimension. On remarque que, à tout correspond un
correspond un , quand
, quand et
et .
.
On peut donc utiliser l’équation (10) pour étudier notre système sans modifier l’interprétation physique, ce que l’on fait en appelant (pour simplifier l’écriture) .
.
Finalement, une équation du mouvement est :
(5)
(6)
Adimensionalisation :
On va simplifier l’étude de cette équation en la réécrivant sans dimension.
(7)
La constante dépend des conditions initiales. Donc on pose à ,
, et
et . D’où
. D’où et après calculs :
et après calculs :
On définit une nouvelle variable telle que
telle que avec
avec donc
donc est une variable sans dimension.
est une variable sans dimension.
On dérive une première fois par rapport au temps :
On dérive une seconde fois par rapport au temps :

(8)

On injecte ces résultats dans l’équation (7) :
(9)
(10)

(11)
Le portrait de phase se trace à partir d’une fonction de la forme .
.
Or à notre niveau, on ne sait pas intégrer (11) par rapport au temps.
Mais, ce qui nous intéresse c’est le comportement du pendule lorsqu’il est proche de sa position d’équilibre instable car c’est autour de cette position que le pendule semble être le plus simple à rattraper s’il tombe. On approxime alors en faisant son développement limité au premier ordre (c’est à dire pour des angles inférieurs ou de l’ordre de 30°) :
en faisant son développement limité au premier ordre (c’est à dire pour des angles inférieurs ou de l’ordre de 30°) :
(12)
Equation du portrait de phase :

D’où, (11) devient :
(13)
Maintenant, on sait intégrer une telle fonction en fonction du temps en écrivant (13) sous la forme :
Dont la primitive est :

(14)
On remarque que, si à , on garde la condition sur
, on garde la condition sur c’est à dire
c’est à dire mais on pose
mais on pose , on a
, on a donc la constante définie la vitesse initiale.
donc la constante définie la vitesse initiale.
Portrait de phase pour des petits angles :
Nous pouvons enfin tracer un portrait de phase qui décrit le comportement d’un pendule inversé pour des angles proches de la position d’équilibre instable c’est à dire pour des angles allant de -30° ( radian) à +30° (
radian) à +30° ( radian).
radian).
avec la longueur du pendule et donc
la longueur du pendule et donc la hauteur de la masse par rapport au socle.
la hauteur de la masse par rapport au socle.
Les valeurs de , pour lesquelles cette expression dérivée par rapport à
, pour lesquelles cette expression dérivée par rapport à est nulle, correspondent alors aux points d’équilibre. On résout :
est nulle, correspondent alors aux points d’équilibre. On résout :
Maintenant que nous connaissons la dynamique du pendule simple inversé nous pouvons passer à l’étude du principe du pendule forcé inversé.