Le code :
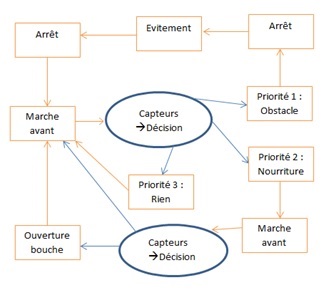
En prenant en compte nos deux réseaux de neurones, le comportement de notre robot suivra le schéma suivant :
Pour le code, nous devions l'implémenter en MatLab. On avait aucune connaissance dans ce langage donc pour le moment nous n'avons pas de code fini.
Néanmoins, nous avons réfléchi sur la procédure à suivre pour pouvoir le réaliser.
Tout d'abord nous implémenterons tous les neurones prenant comme argument, une valeur pour la dendrite, une valeur pour l'axone, un poids synaptique et un seuil de dépolarisation. Puis nous créerons deux fonctions, une pour se déplacer, qui prend pour argument une entrée (celle des capteurs sonar et tactile) et le poids synaptique, et une autre pour se nourrir, qui elle prendra comme argument une entrée (celle du capteur vision) et la couleur de la bille.