Réseau de neurones pour le déplacement :
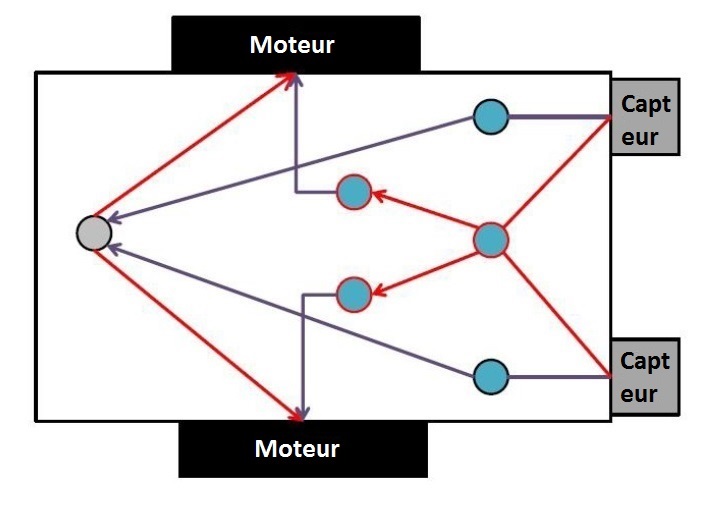
Le schéma ci-dessus représente le réseau qui permet au robot de se mouvoir. Nous avons imaginé un réseau assez simple qui comporte 6 neurones. Le neurone gris, représente un neurone générateur de pattern qui est relié aux moteurs (aux muscles) du robot, et permet au robot de se déplacer sans cesse. Lorsqu’un des deux capteurs détecte quelque chose (un obstacle), il envoie un signal aux deux neurones bleus et noirs, qui sont inhibiteurs et reliés au neurone générateur de pattern. Cela va permettre de stopper le robot lorsque ce dernier capte un obstacle devant lui. Les capteurs envoient aussi un signal au neurone bleu et rouge, qui lui est excitateur. Il va exciter deux autres neurones, qui vont activer les moteurs dans le sens inverse (faire fonctionner les muscles antagonistes) avec des poids synaptiques différents, pour que le robot puisse reculer tout en se tournant d’un certain angle, afin de contourner l’obstacle.
Une fois que l’obstacle est dépassé, le robot se remet en marche et continue son exploration de l’environnement.
Un neurone générateur de pattern est un neurone qui génère des potentiels d’action à intervalles réguliers, de façon rythmique sans avoir nécessairement besoin de recevoir d’entrées.