Réseau de neurones pour que le robot se nourrisse :
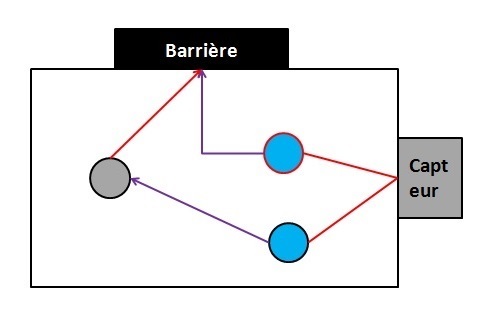
Le schéma ci-dessus représente le réseau de neurone qui permettra au robot de se nourrir seul, de savoir si la nourriture qu'il détecte est bonne ou mauvaise pour lui.
ce réseau est constitué de 3 neurones. Toujours un neurone générateur de pattern qui permettra de bloquer la barrière (la bouche) en mode " fermée ". Lorsque le capteur détectera une bille (de la nourriture), si celle-ci est bonne, le capteur enverra un signal au neurone qui inhibera le générateur pattern pour qu’il arrête de bloquer la barrière et enverra aussi un signal à un autre neurone qui lui permettra d’ouvrir la barrière pour que le robot puisse manger.