Holographie d'un objet ponctuel
Introduction
L'holographie d'un objet ponctuel est une étape importante de l'holographie optique, car un objet complexe n'est en effet, qu'un ensemble de points. Pour le décrire, il suffira de sommer les interférences que créent chacun de ses points entre eux et avec l'onde de référence.
Nous pouvons donc expliquer l'ensemble de la théorie de l'holographie optique et numérique, en ne s'intéressant qu'à l'holographie d'un seul point.
Prévisions théoriques
On rappelle que l'intensité créée par deux sources ponctuelles sur un plan ressemble à une mire dont l'équation est:

Lorsque l'on fait une simulation numérique de l'hologramme on obtient une image du type:
 Si l'on veut obtenir une image virtuelle de l'objet, il faut effectuer le même travail que notre oeil. C'est à dire une transformée de Fourier.
Si l'on veut obtenir une image virtuelle de l'objet, il faut effectuer le même travail que notre oeil. C'est à dire une transformée de Fourier.
Le calcul de la transformée de Fourier dans le cas d'un objet ponctuel, donne:

On observe 3 pics sur la transformée de Fourier; un pic central et deux pics latéraux.
Résultats expérimentaux
On utilisera une tête d'épingle comme objet ponctuel.
Le montage optique est celui décrit précédement.
La source de référence et la tête d'épingle sont dans le même plan (à 40 cm du capteur CCD) et distantes de 3,5 mm selon ox.
L'image ci-dessous est une photographie du système de franges réalisée avec le capteur CCD.
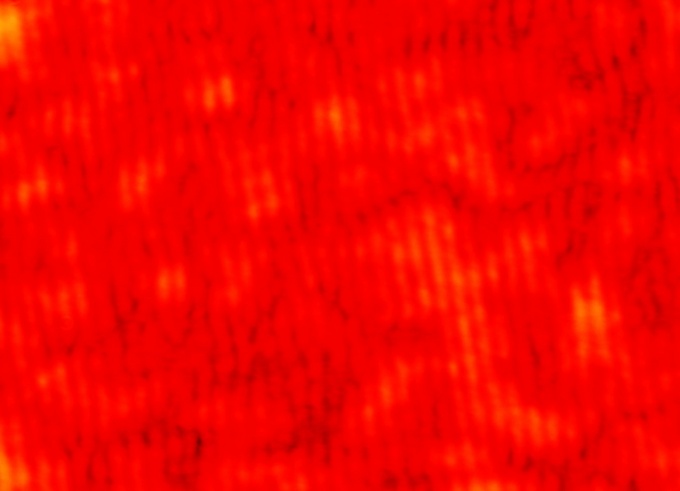
La transformée de Fourier (le module) appliquée à ces franges présente l'allure suivante :
 Expérimentalement on aperçoit bien trois taches:
Expérimentalement on aperçoit bien trois taches:
- une à droite qui correspond à une image de l'objet ponctuel
- une à gauche de position symétrique à celle de droite.
- une au centre dont l'amplitude est proportionnelle à la somme des intensités des faisceaux. Elle est ici entourée d'artefacts dûs au support de l'épingle.
Remarque
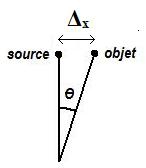
A partir de la position des taches, nous pouvons retrouver la distance Δx séparant l'objet ponctuel de la source.
ϴx=2U1/λ Application numérique: ϴx=0,095 rad. ϴx = 0,4*tan(ϴ) = 3,8mm
La valeur mesurée entre la source et l'épingle étant de 3,5mm +/-1mm, on peut conclure que cette méthode permet de retrouver les dimensions de l'objet dans le plan parallèle au capteur.