| Accueil | Introduction | Théorie | Experimentation | Exploitation |
| Conclusion | Remerciements | Bibiographie | Annexes | Dossier |
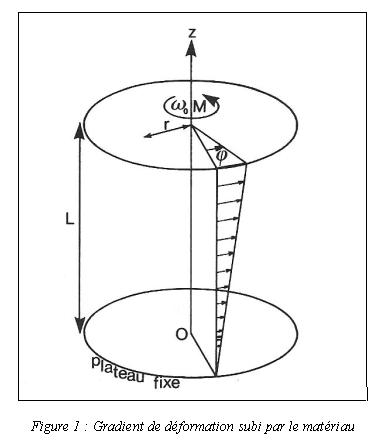
Partie I: Rhéomètre à fluage plan/plan (rotatif) Toutes nos mesures ont été effectuées à l'aide d'une géométrie plane de référence PP 35 Ti (géométrie plane de diamètre 35 mm constituée de Titane) Ce
type de rhéomètre, encore appelé
rhéomètre de torsion,
est constitué de deux disques parallèles, de
même axe Oz, de rayon R, distants
de L ; l’un des disques est maintenu au repos,
tandis que l’autre est soumis à un couple
M
(voir figure). Sous
l’effet de ce couple, la substance ce décompose en
couches circulaires, parallèles aux disques solides.
ἐ
= r δω/δz Si
l’on ecrit l’équation fondamentale de la
dynamique,
relativement à l’élément de
volume compris entre r et r+dr, z et z+dz, on
obtient ,en négligeant les forces
d’inertie : τ(r,
z + dz) = τ(r,z) Soit
encore: δτ/δz = 0 La
contrainte ne dépend pas de z ; il en est de
même
pour ἐ, si bien que l’on peut écrire : ἐ(r,
t) = r ∂ω/∂z = ω0(t)
r/L L’expression
explicite de τ en fonction du couple appliqué M
est obtenue en utilisant l’hypothèse de
linéarité ; d’après
la
relation : τ(r,
t) =ε(r, t) g(0) + ∫0t
ġ(t-t’)
ε(r, t’) dt’ Relation
que l’on peut encore écrire,
d’après :
τ(r, t) = (r/L) h(t)
(1) Avec : h(t)
= g(0) φ(t) + ∫0t ġ(t-t’)
φ(t’) dt’
Il
vient alors, pour le couple M
imposé : M(t) = ∫0R 2 π r τ(r, t) r dr = (2π/L) h(t) ∫0R r3 dr
= π R4 h(t)
/ 2L Comparant
avec la relation (1), on obtient finalement :
τ(r, t) = 2 r M(t) /
π R4
(2) Soulignons
que, si la relation (1) est toujours valable, la
relation (2) n’est satisfaite que dans le cas des
matériaux linéaires. On
a ainsi démontré que, pour un matériau
linéaire, la
contrainte et la déformation de cisaillement ne
dépendent pas de la hauteur z
de la couche considérée ; ils
dépendent par contre de la distance r à
l’axe de rotation : τ(r) =2 r M /π R4 ε(r, t) = r φ(t) / L
Partie II: Aspects microscopiques et dynamiques
Cette partie constitue un complément des notions théoriques abordées dans la Section du même nom. i) Notion d’hystérésis
L'hystéresis est la qualification donnée à un phénomène qui n'est pas totalement réversible. Pratiquement, l'aimantation d'un solide (a fortiori d'une particule) est soumise à une hystérésis semblable à celle de la figure ci-dessous:
Cela peut se comprendre aisément: nous avons vu dans la Section "Théorie" qu'une particule magnétique de MRF était constituée de domaines de Weiss. Lorsque l'on soumet la particule à un champ magnétique, les domaines de Weiss ont tendance à s'orienter suivant les lignes de champ. Quand on ramène ce champ à une valeur nulle, les domaines de Weiss ne retournent pas totalement dans leur configuration initiale et il subsiste alors une orientation majoritaire des spins au sein de la particule. Ainsi, le matériau possède une aimantation rémanente, même lorsque le champ devient nul. On parle souvent "d'effet de mémorisation" de l'aimantation. Le protocole expérimental employé pour les fluides magnéto-rhéologiques s'avère donc pertinent: le précisaillement est nécessaire pour briser les chaînes de particules générées par l'aimantation rémanente (et qui entraîne une interaction magnétique "résiduelle"). ii) Bilan des forces Les fluides magnétiques sont le siège de plusieurs forces de cohésion et de séparation. Nous ne cherchons pas à établir leur expression littérale, mais seulement à les présenter.
où x représente la distance entre les surfaces de deux particules, d leur diamètre, et A la constante de Hamaker (~ 10-19 J). Cette force diminue néanmoins rapidement en x6 : pour x petit, la force U' est prépondérante On endigue cette interaction à courte portée en recouvrant les particules de surfactant.
|