Speed
This experiment leads us to the core of our project. Indeed, this is the part of the project which allows us to experiment over
our supervisor's theory. In order to confirm this theory, we implemented the following experiment.
Protocol in a nutshell :
We decide to do this experiment at 6 different flow velocities (20Hz, 22.5Hz, 25Hz, 27.5Hz, 30Hz, 35Hz).
-
Measure the 0 (without speed from neither the vein nor the fish) for reference.
-
Switch on the vein at a given frequency corresponding to a certain stream velocity.
-
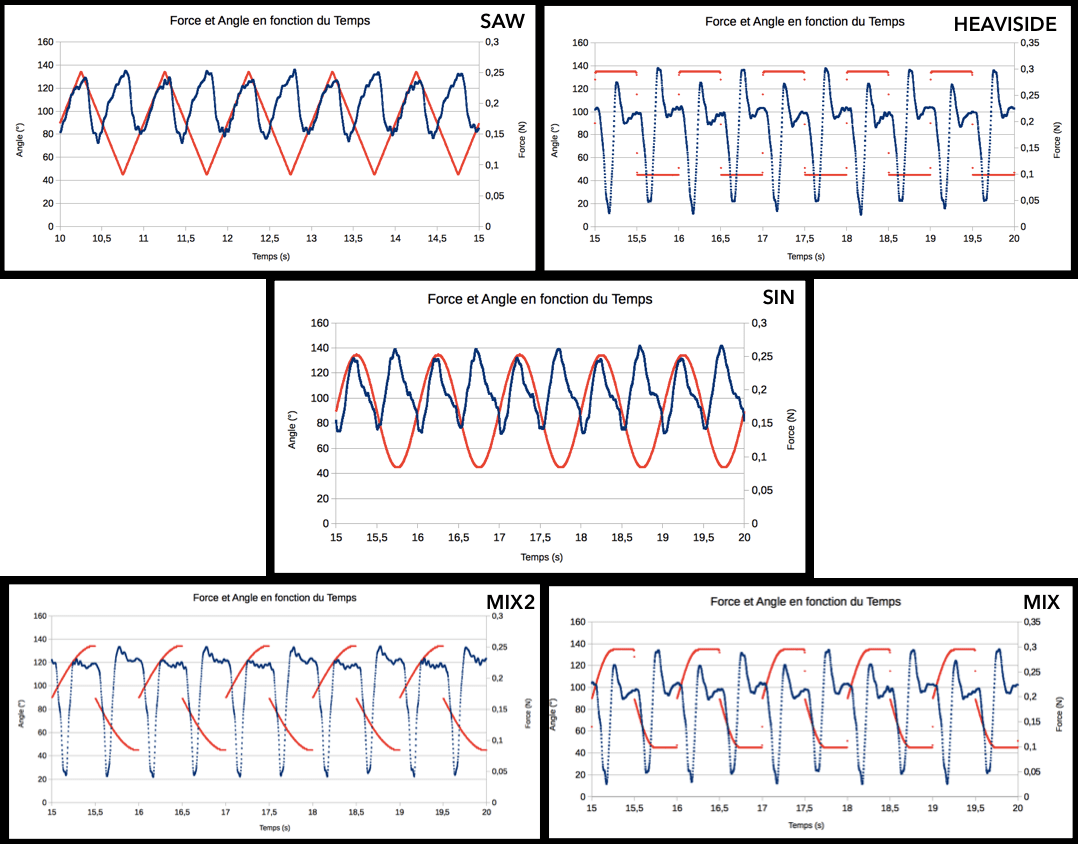
Begin an acquisition of the force measured by the force sensor, when the fish is moving at a certain couple (A,w).
-
Repeat the measure of the 0 before further measurements, since it changes between two measures.
-
Repeat for every couple (A,w) and then, repeat for each of the 6 different frequencies (flow velocities).
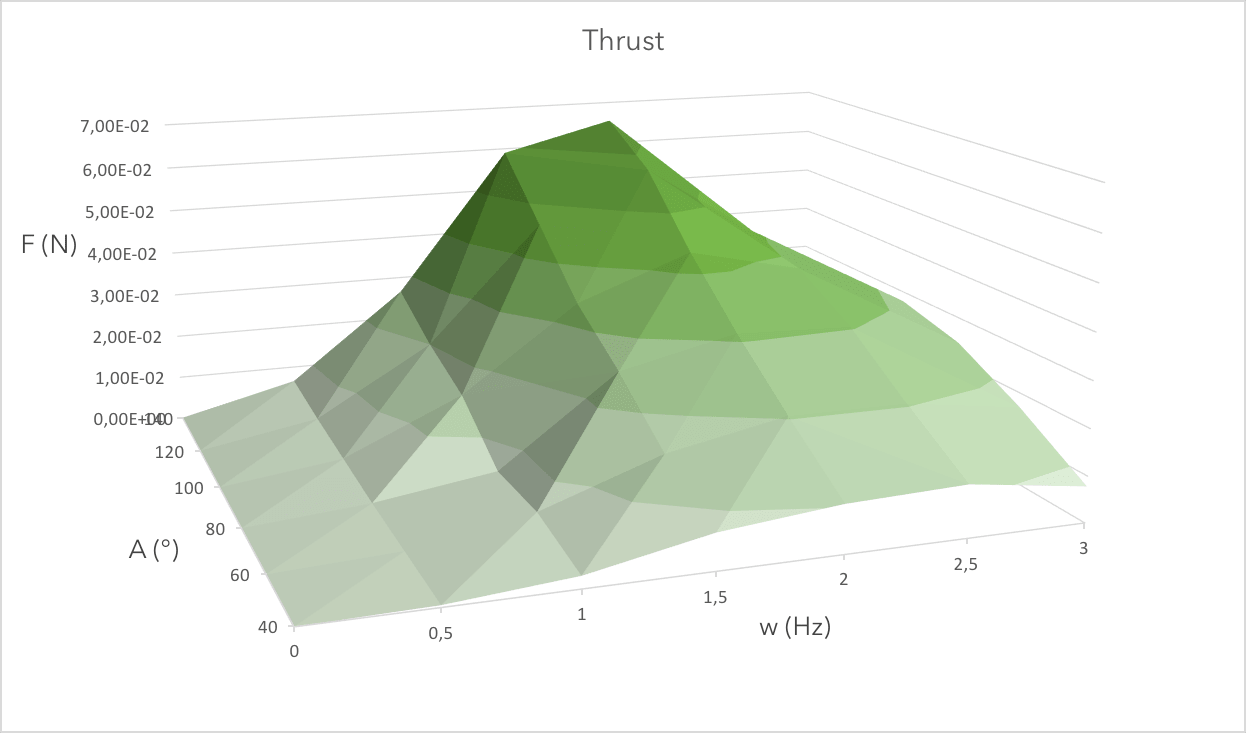
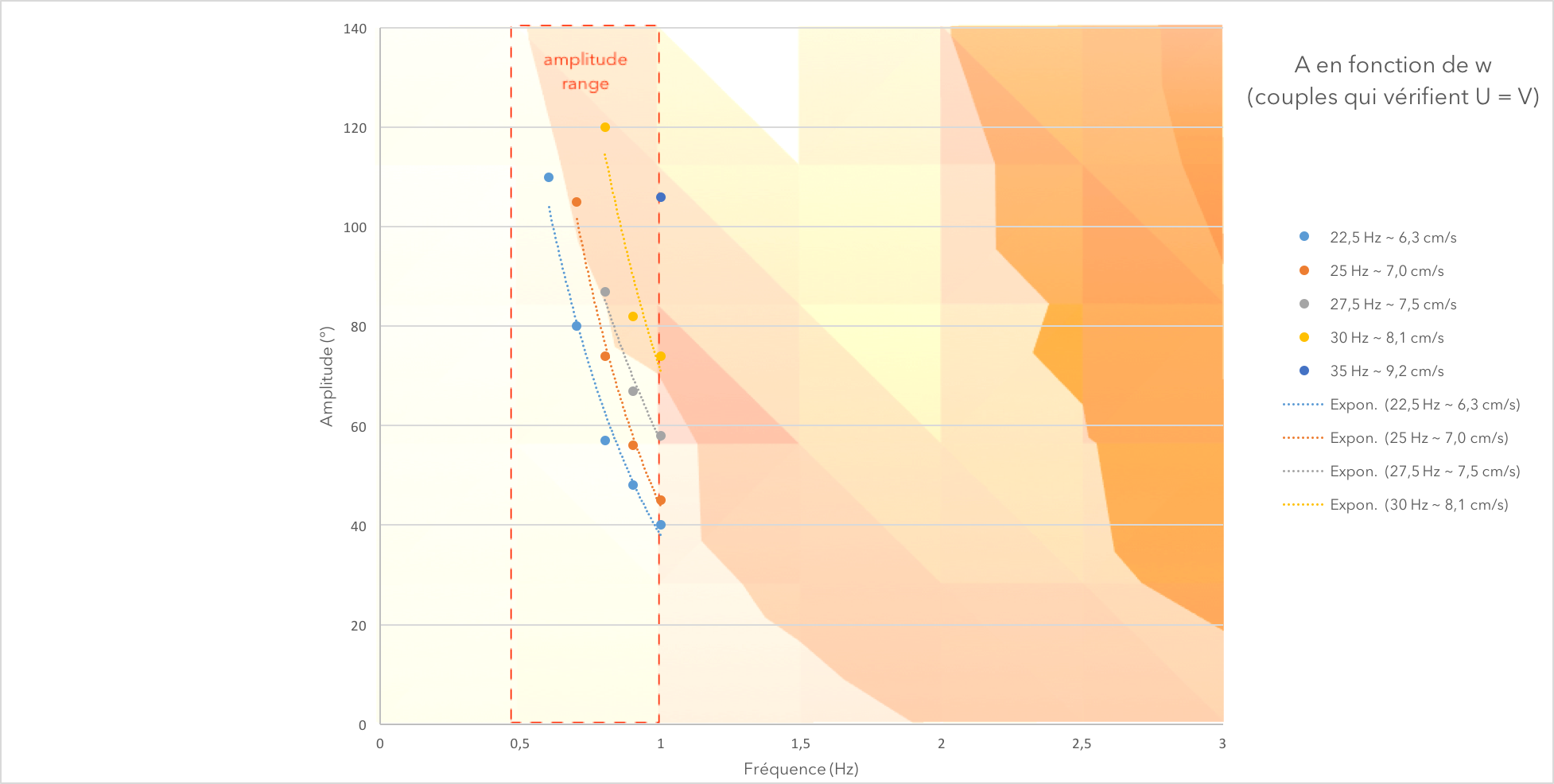
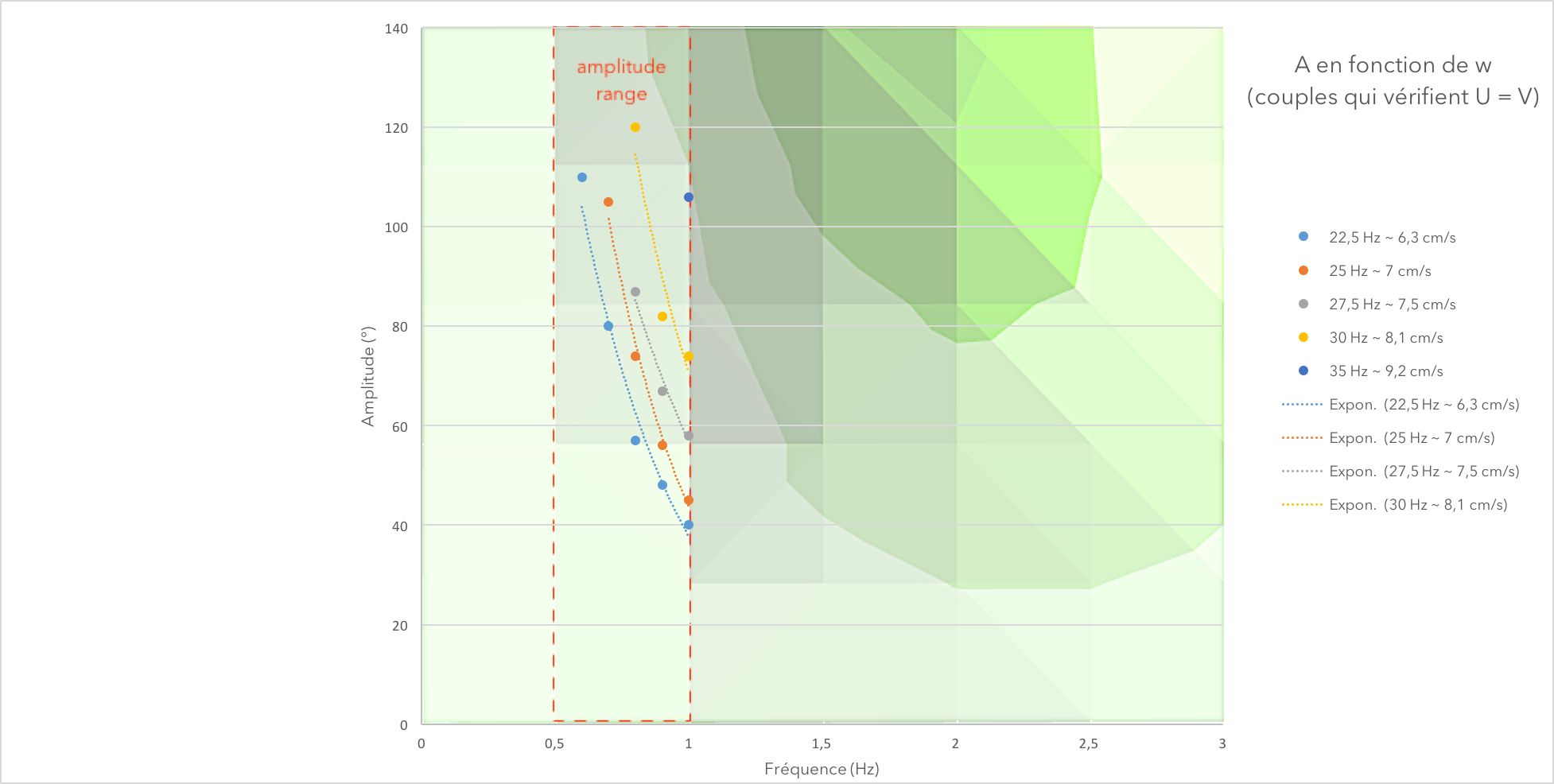
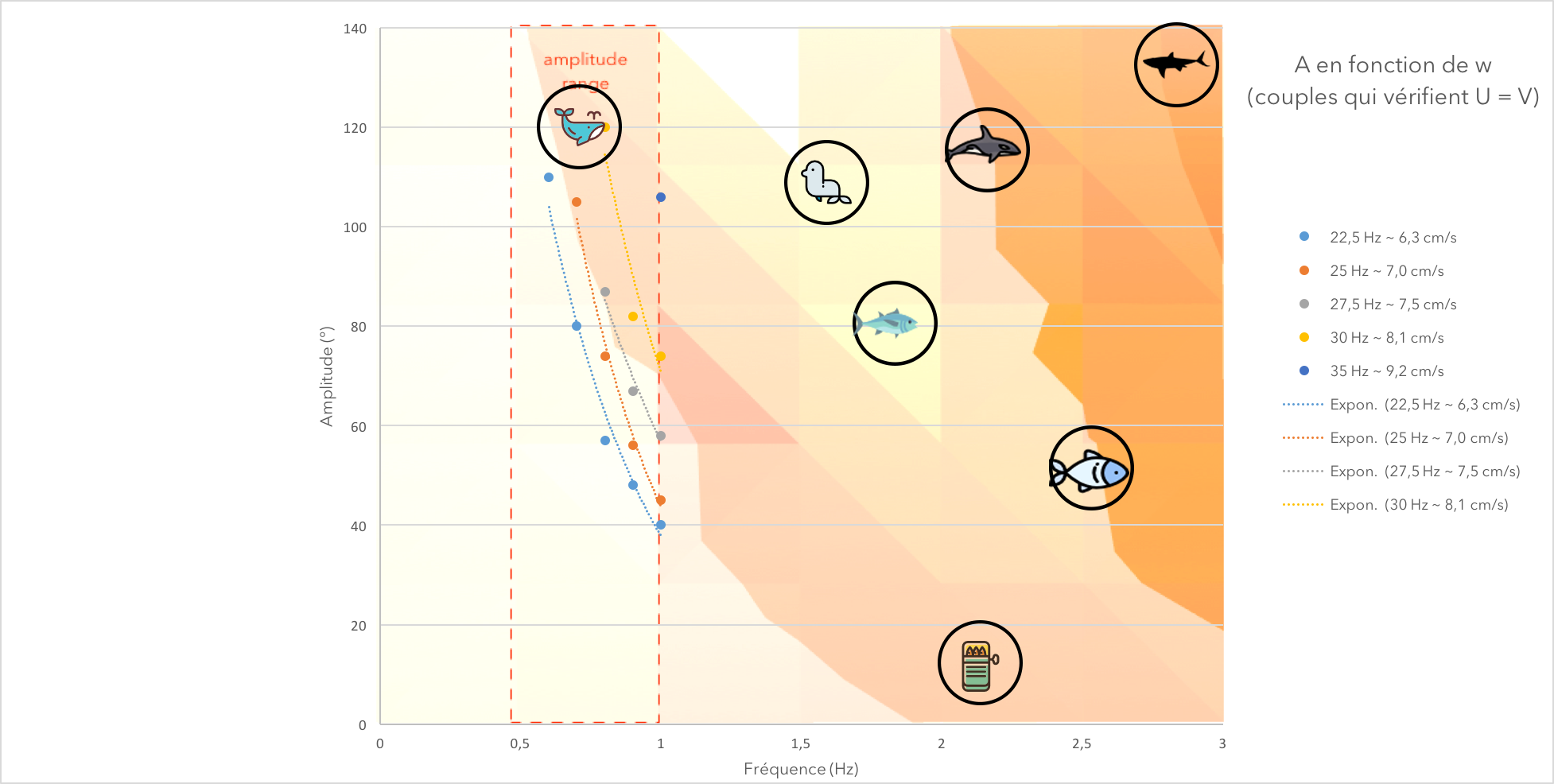
Result :
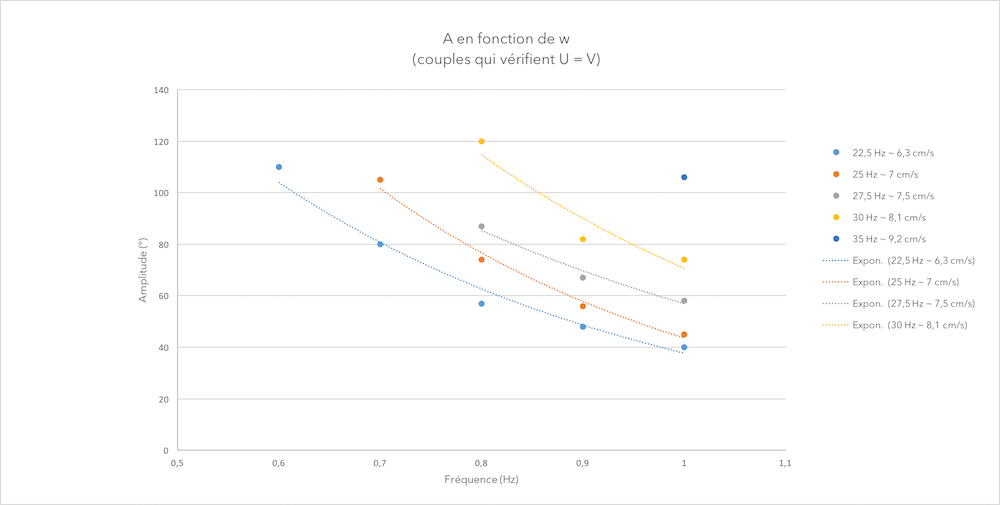
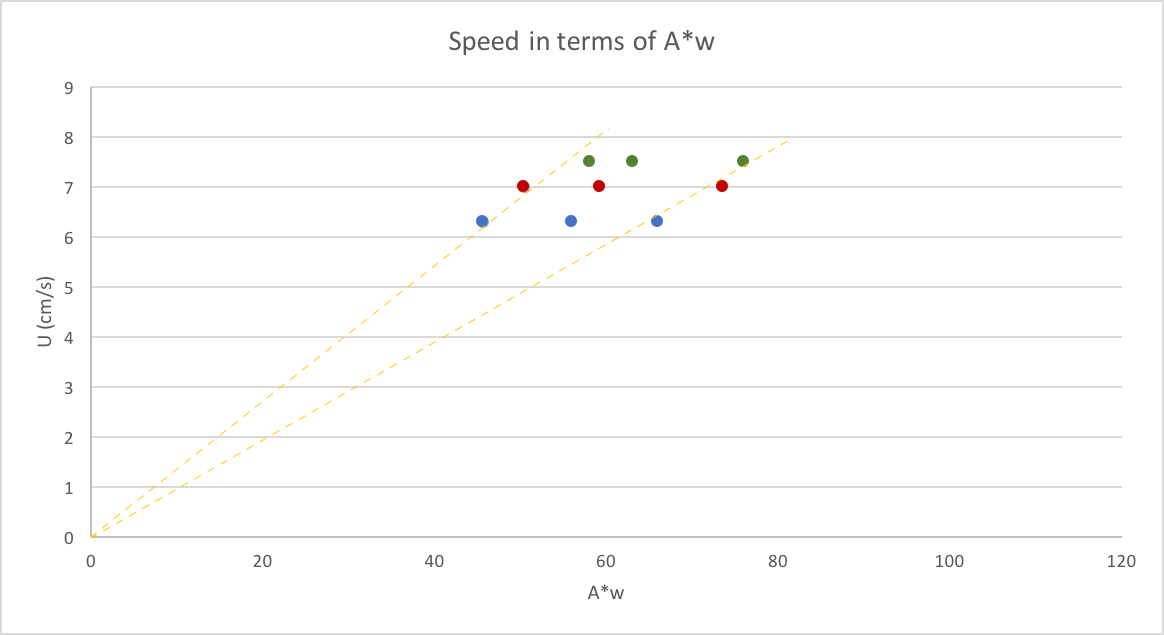
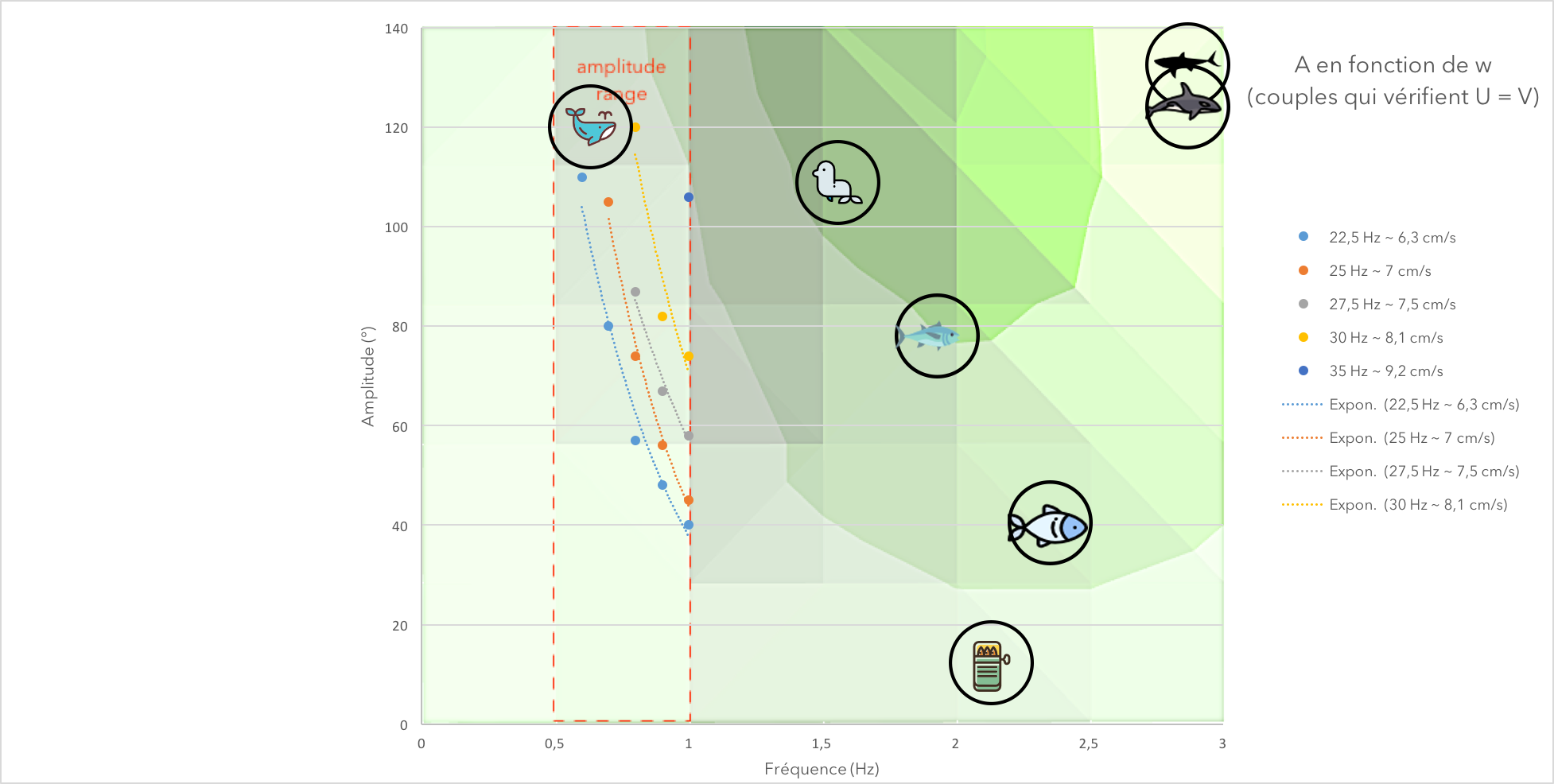
On the first figure, we can see 5 lines representing speed isolines. They are the set of couples (A,w) that verify a given speed. On the second one, we drew the speed in terms of each couple (A,w) under the form
A⋅
w (in the same color would be 3 couples that verify the same speed).
Conclusion:
With this experiment, we found different couples (A,w), verifying the same speed.
We now know exactly what couple of frequency and amplitude to apply if we want the fish to reach a certain speed. We also can see the possibilities an limits (lowest and highest speed) of our fish (due to the servomotor limits).
In addition to that, we can see on the second figure that the speed U of the fish depends linearly on the factor
A⋅
w, in accordance with Médéric Argentina's theory.