Different kinds of ressources
Material
Here are every equipment that we used during our project :
- Hydrolic Vein : Rolling High Research (0710)
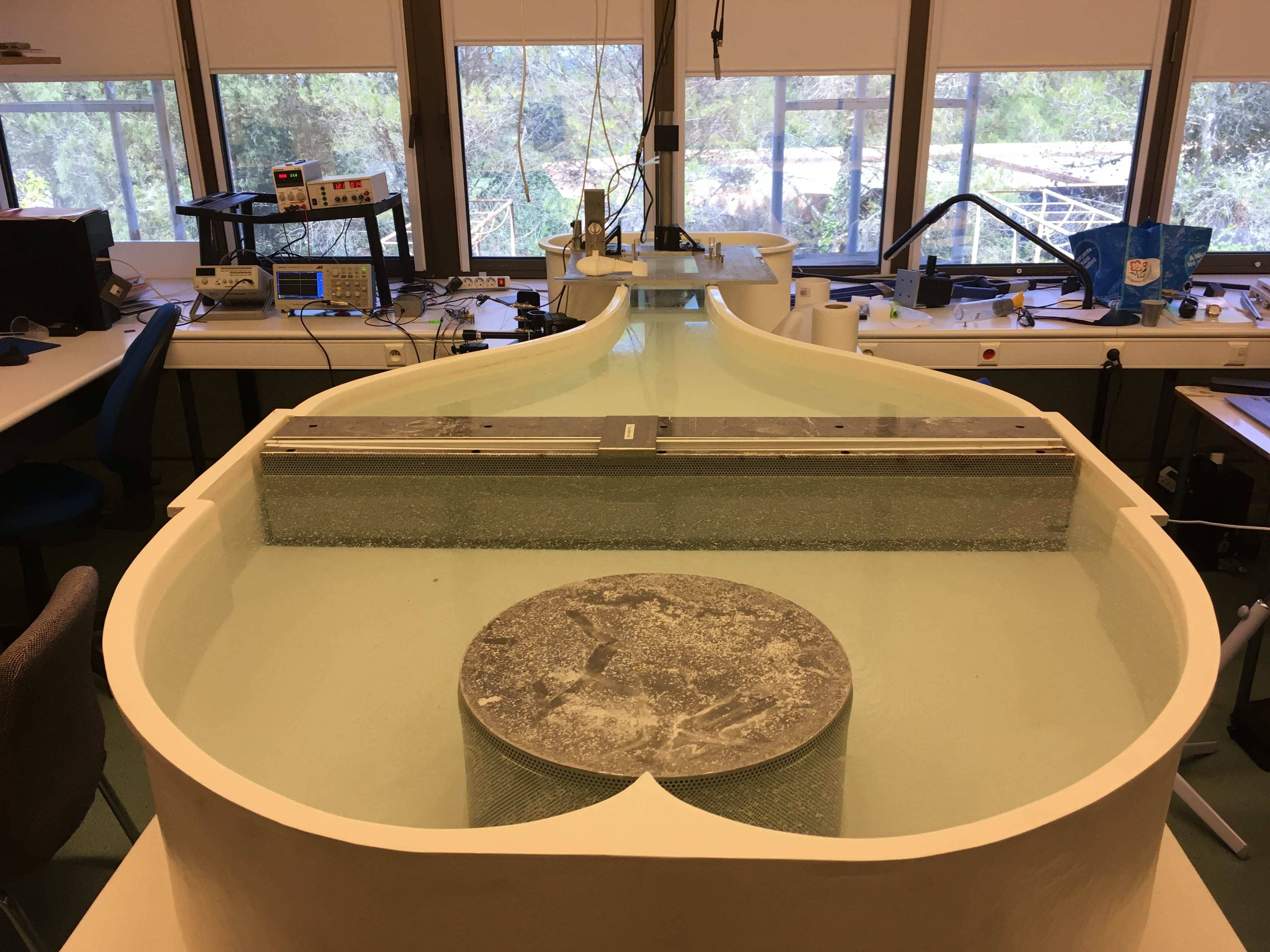
- Hydrolic Vein's motor : Type M111 5SB - AC Tech (1345 5647 3469 11 440),
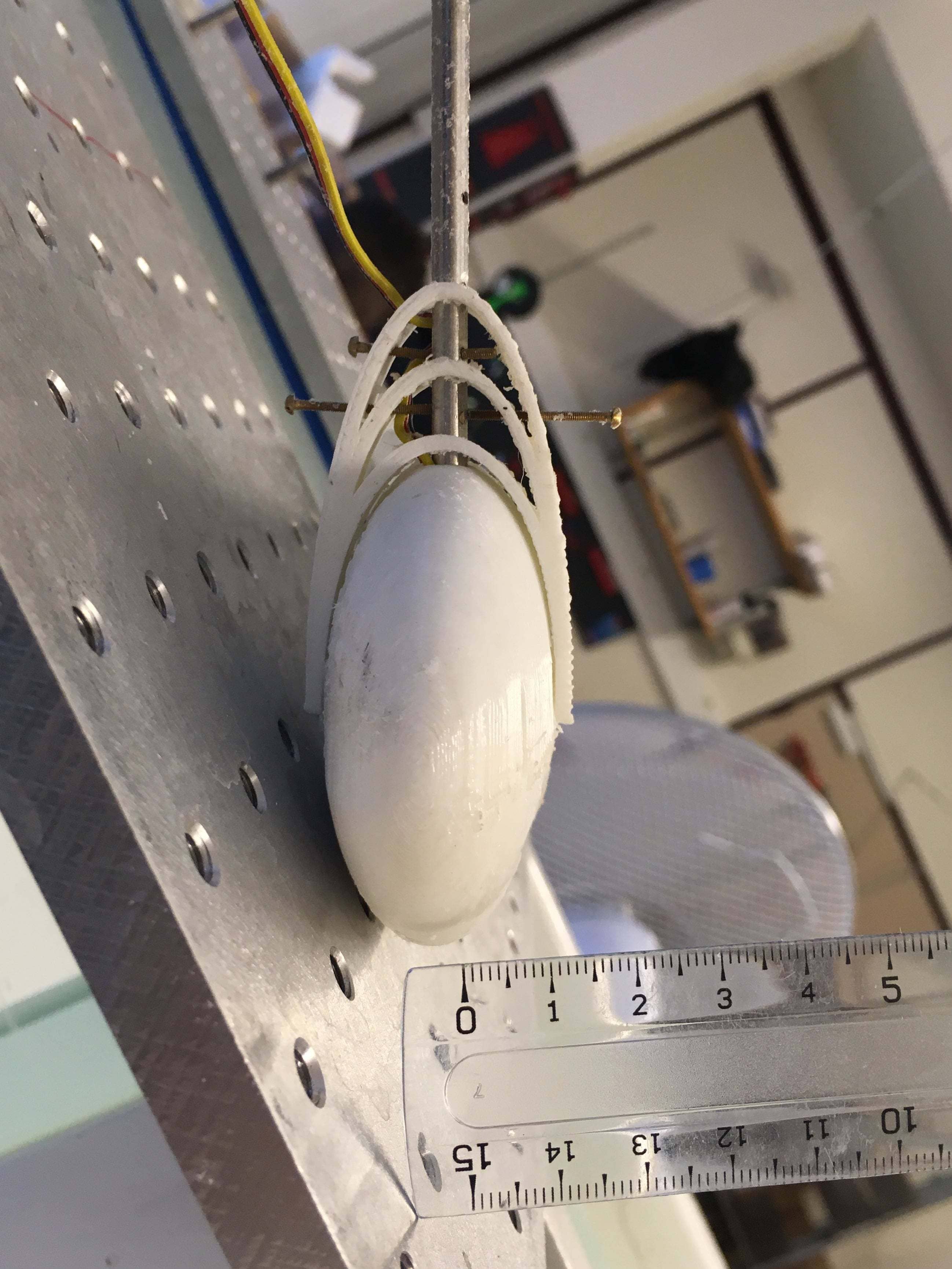
- Fish : Dimensions - 16mm (semi minor axis) - 32mm (semi major axis)
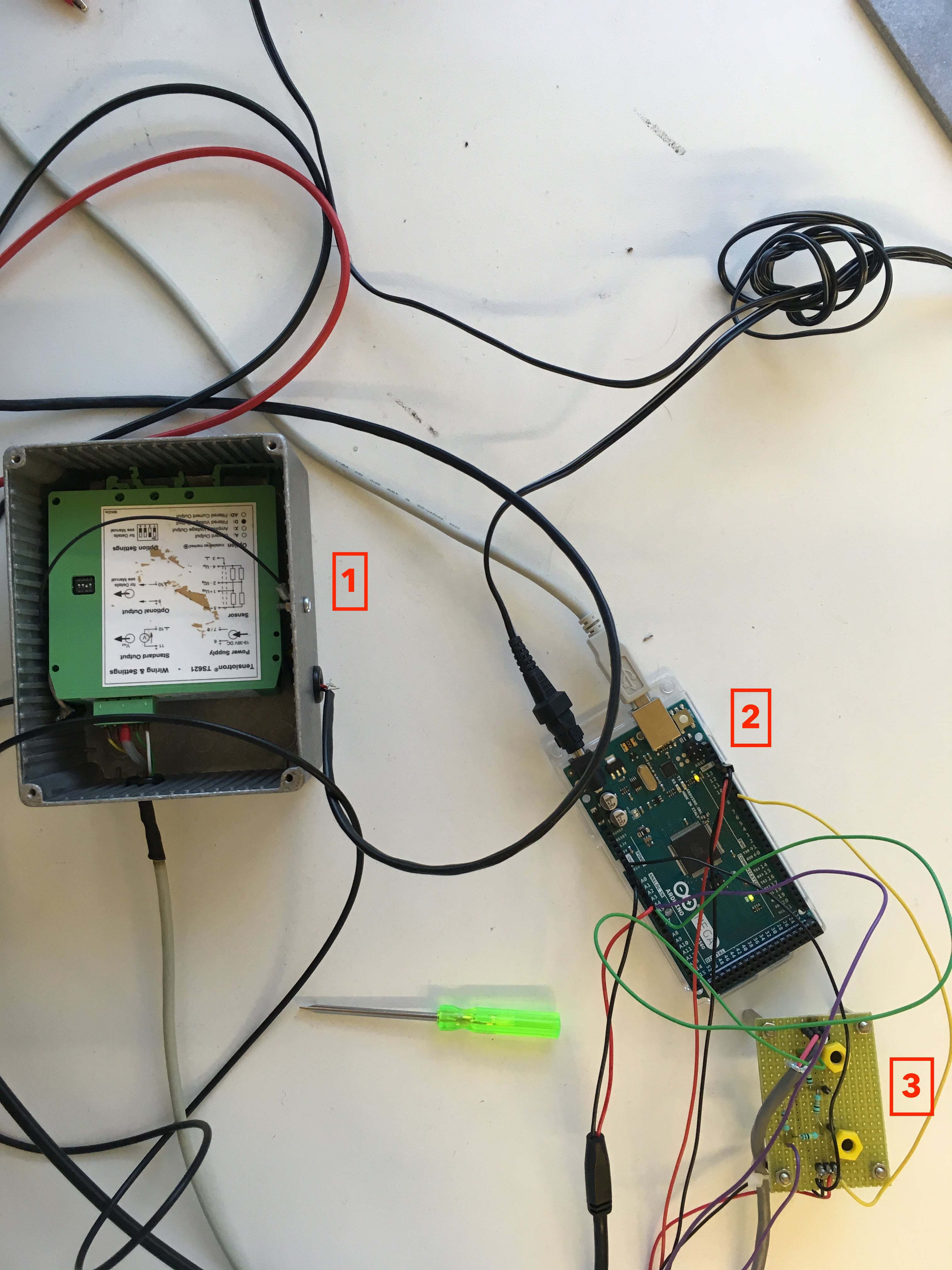
- Force sensor (1) : HONIGMANN (Nr.612245)
- Arduino circuit, (2)
- Voltage divider, (3)
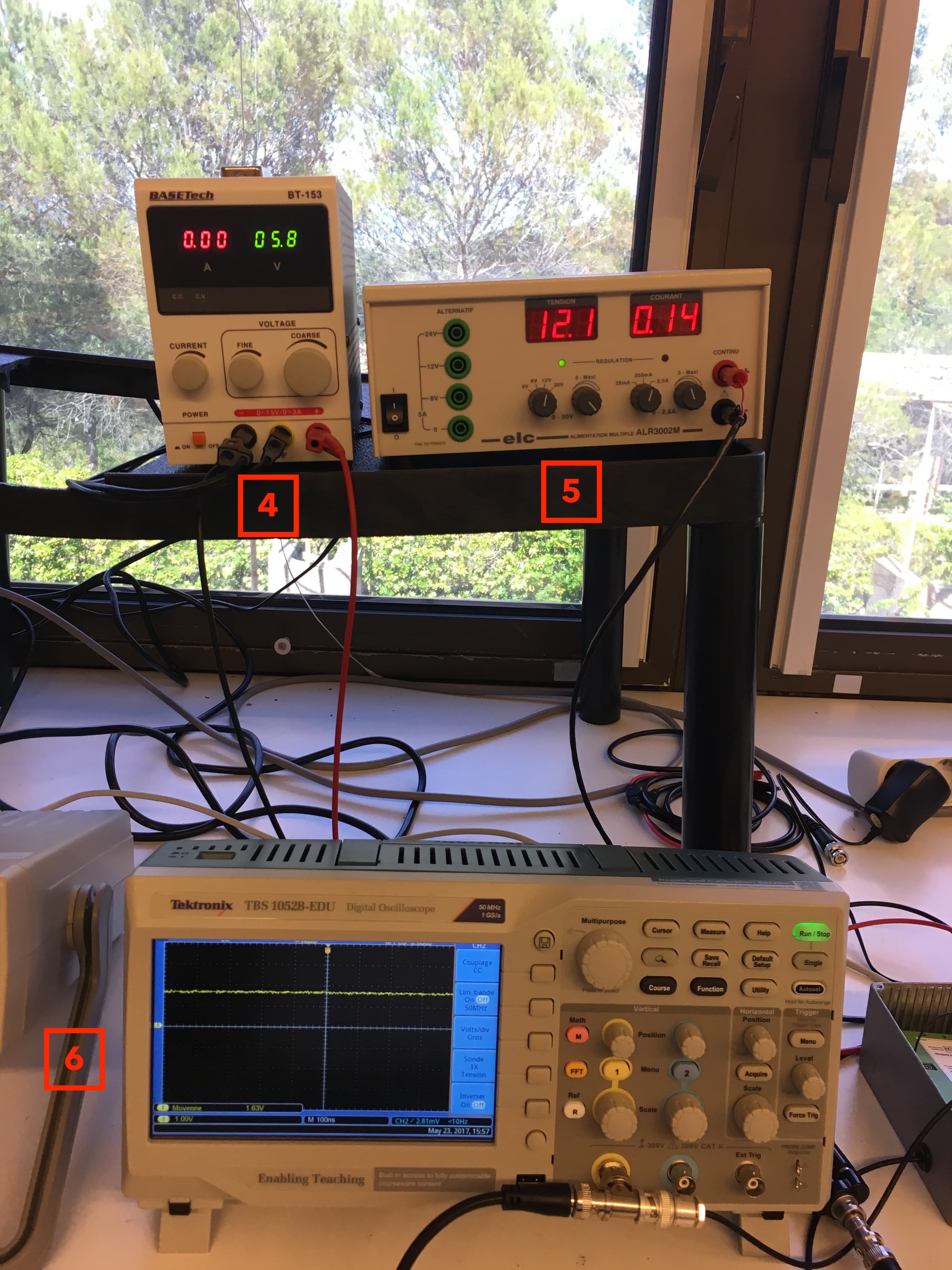
- Arduino circuit's, and servomotor alimentation (4) : BASETech (BT-153)
- Force sensor's alimentation (5) : ELC (ALR3002M)
- Oscilloscope (6) : Tektronix (TBS 1052-EDU)
- 3D-Printer : Volumic (Vstream Premium)
- Laser : Coherent (VERDI-V8)
Software
- FreeCAD (conceive 3D parts) (0.16),
- Simplify3D (print 3D parts),
- Python programs (2.7.13) :
Python is a platform that reads and executes code. We use it with Arduino to make programs that gather results and write them down in text files.
- Arduino programs (1.6.12) :
Arduino is an open-source electronics platform based on easy to use hardware and software. We use it to program our fish movements.
- Matlab (R2017b) :
Matlab is a high performing language, that integrates computation, visualisation, and programming in simple mathematics notations. We use it to calculate and analyse our data.
- ImageJ :
We use it to treat the data (images) obtain from PIV acquisitions.
- Microsoft Excel and LibreOffice Calc.
Bibliography
- Wikipedia. Thrust, Drag, Voltage divider.
- Adil Ridha (Université de Caen). Couche limites, 2010.
- L. Petit, E. Guyon, JP. Hulin. Hydrodynamique physique. EDP Sciences/CNRS Éditions, 1991.
- L. Mahadevan, M. Gazzola, M. Argentina. Scaling macroscopic aquatic locomotion. Nature Physics, 2014.