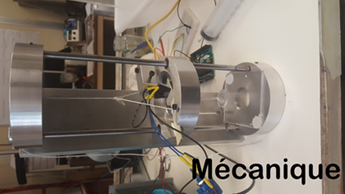
Mécanique
1ère étape : le choix de la poutre
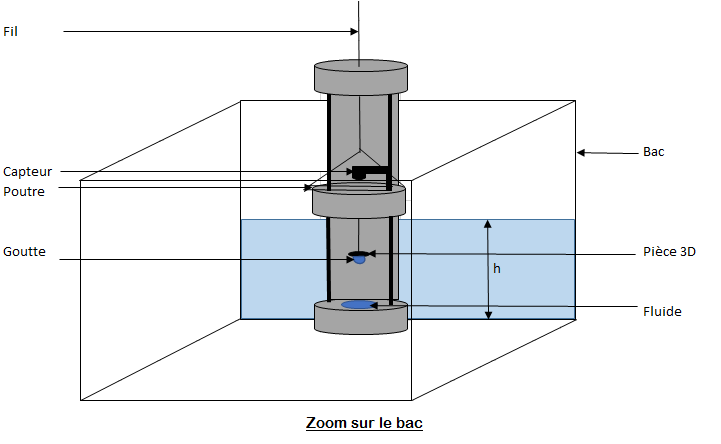
Le capteur est capable d'observer une variation à 10 micromètres près, ainsi plus la poutre est souple plus la variation sera visible. Après plusieurs essais nous choisissons de prendre une poutre d'épaisseur e = 0,04mm.
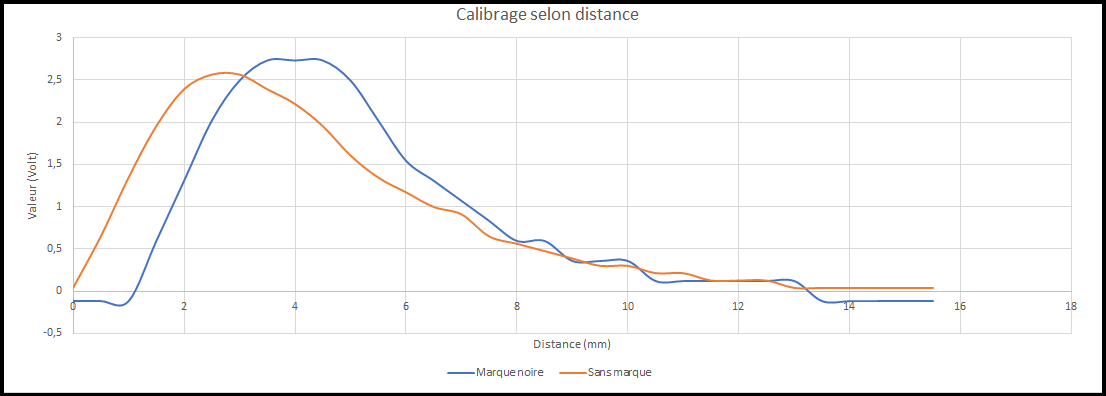
Cette réfléxion dépend de la nature de la surface de la poutre. Nous avons par conséquent essayé plusieurs revêtements : la poutre seule, la poutre munie d'une tache noire dessinée au marqueur et la poutre munie d'un post-it de couleur jaune collé à l'aide de glue. Nous avons obtenu les meilleurs résultats grâce à cette dernière méthode.
Ainsi pour nos expériences, la poutre sera d'une épaisseur e = 0,04mm avec un post-it collé dessus au niveau du capteur.
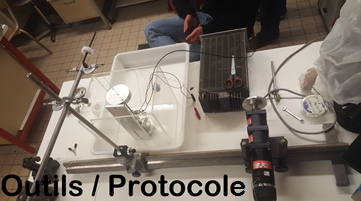
2ème étape : Calibration de la distance
Pour cela, on étalonne à l'aide d'une vis micrométrique.
On obtient alors, pour les premiers revêtements la figure suivante :
Pour le post-it, afin d'être plus précis, on réalise la même calibration mais à 100µm près. On observe alors la courbe suivante :
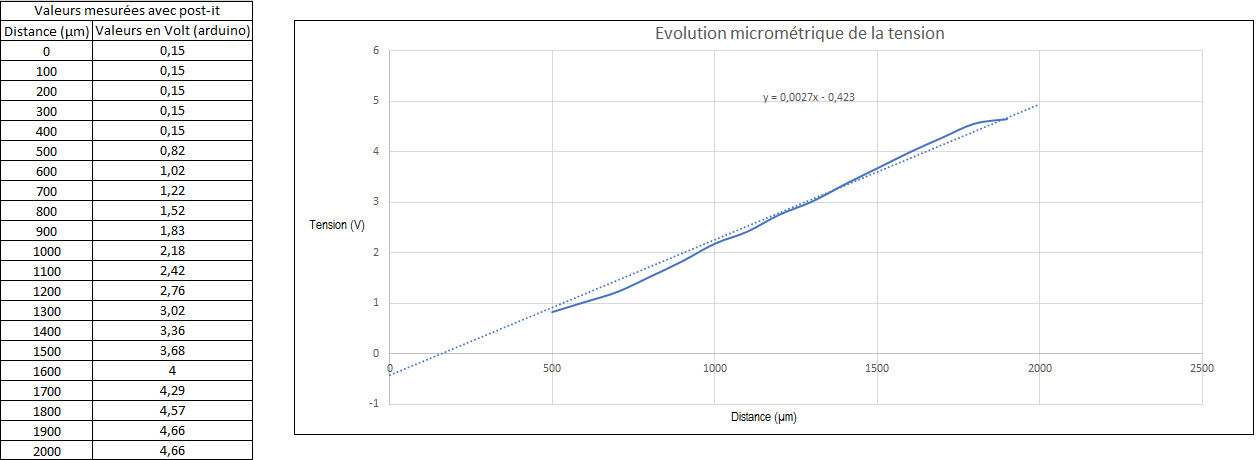
Ainsi, nous pouvons dire que la tension est proportionnelle à la distance entre 500µm et 1800µm.
On obtient comme équation de la droite : y = 0,0027x - 0,423 , qui nous permet de convertir les volts obtenus en une distance.
Nous placerons donc notre capteur à une tension minimale de 0,8V, afin de se trouver dans la plage linéaire.
3ème étape : Calibration de la force
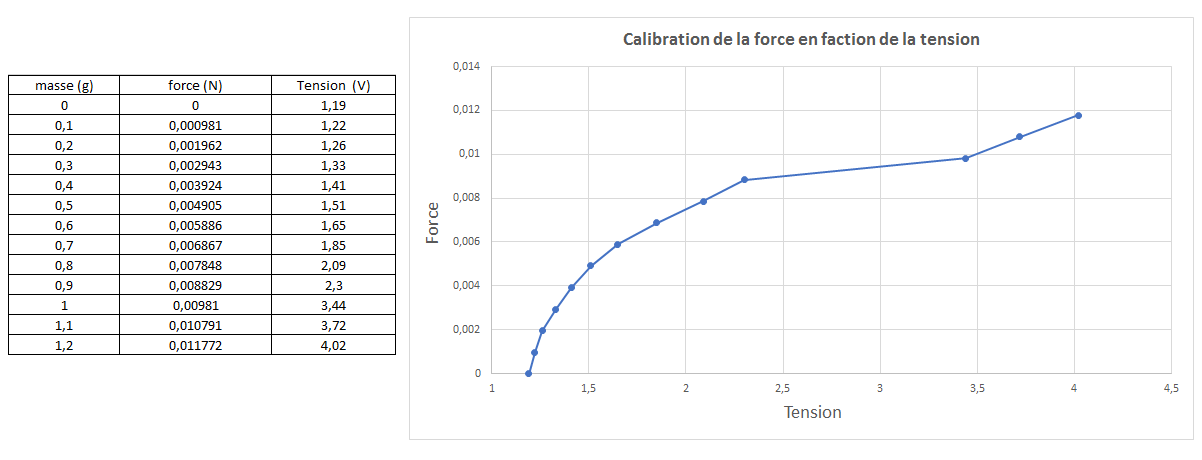
En effet la relation entre la déflexion de la poutre et la force n'est pas triviale, pour cela on procède à un étalonnage direct qui reliera la force appliquée à la tension mesurée. On place donc des masses de 0,1g sur l'ensemble {poutre + pièce en 3D} afin d'observer la réponse du capteur. On choisit des masses de 0,1g afin d'obtenir des forces de l'ordre de 10-3N.
On obtient alors les données suivantes :
Lors de nos expériences, nous n'observerons que de très petits déplacements de la poutre et donc une force relativement faible. Nous zoomerons alors sur des tensions plus faibles.
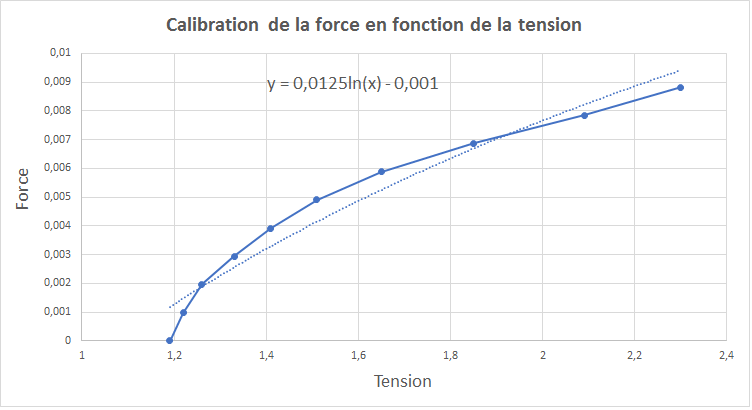
Ainsi on obtient l'équation logarithmique suivante : y = 0,0125ln(x) - 0,001 , qui nous permet d'obtenir la force appliquée sur la poutre en fonction des Volts acquis par le capteur.
4ème étape : L'expérience