Accueil
Méthode expérimentale
Méthode géométrique
Méthode numérique
Etudes des incertitudes expérimentales
Méthode Semi-numérique
Incertitudes liées aux points choisis
Conclusion
Annexe
Remerciements
Rapport

Incertitudes liées aux points choisis:
Nous allons maintenant supposer la position du canon connue et
essayer de déterminer les incertitudes que nous donne le choix
des points; c'est-à-dire pouvoir répondre à la
question: est-ce que mettre les points dans une certaine configuration
nous donnera de plus faible incertitudes que dans une autre?
On pourra donc étudier différents cas parmi
les plus généraux qui nous permettrons de mieux
comprendre comment varie les incertitudes en fonction des points
choisis.
On place les trois points à étudier sur la carte. Nous
prendrons ici les deux cas qui nous semblent les plus
intéressants à traiter, a savoir : une configuration en
ligne des trois points par rapport au canon, ainsi qu'une configuration
en arc de cercle des trois points autour du canon, sur le même
plan d'onde (n'importe quel cercle ayant le canon pour centre).
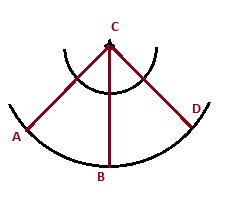
Fig7:Configuration 1
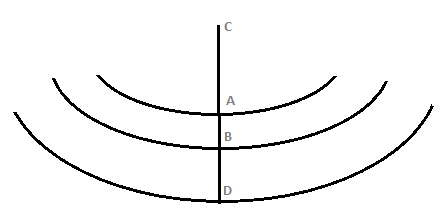
Fig8:Configuration 2
Avant de faire le calcul, étudions ces configurations, nous
pourrons ainsi comparer nos résultats avec ce que nos
prévisions.
On peut se dire par exemple que la configuration 1 donnerait des
grandes incertitudes car les différences de temps seraient
très faibles entre les trois observateurs étant
donné qu’ils se trouvent sur le même plan
d’onde.
De même on peut penser que la configuration 2 serait plutôt
bonne pour les incertitudes car on aurait alors des différences
de temps plus grandes entre nos observateurs.
Cependant, après les calculs on constate que la configuration 1
nous donne un résultat tout à fait acceptable.
Pour la configuration 2 on trouve des incertitudes énormes,
bien plus grande que ne l'est la dimension de notre carte. Nous allons
donc essayer de comprendre cela en appliquant la "méthode
semi-numérique". Les solutions de la position du canon seront en
fait données par une demi-droite partant du point A et
dirigée vers le canon. La "méthode
géométrique" nous donnera la même chose, car cela
reviendrai à prendre pour solution l'ensemble des centres des
cercles passant par le point A et tangent au deux cercle passant par
celui-ci (de rayon CB-CA centré en B et de rayon CD-CA
centré en D), donc la demi-droite évoqué
précédemment.
On pourrait expliquer de si grandes incertitudes pour la configuration
2 en pensant au fait que dans notre repère on aurait plus aucune
coordonnées suivant y ce qui entraîne peut être
cela. De plus les hyperboles tendent vers une droite lorsque les points
tendent vers l’alignement (voir schéma ci-dessous)
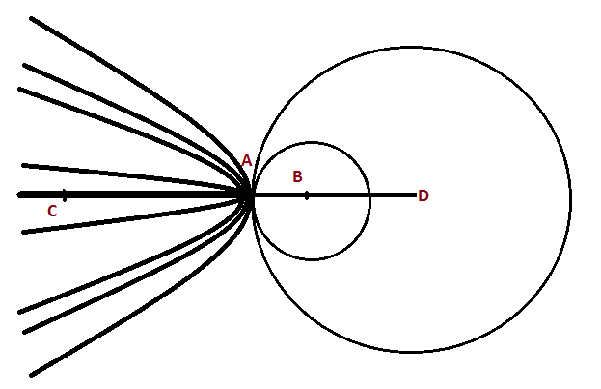
Fig9:Schéma des hyperboles tendant vers une droite et représentation des cercles.