Content
A more detailed study of the chaotic pendulum
Fixpoints
In order to do a stability analysis of our system's fixpoints, we first need to determine their coordinates.
A fixpoint is a location in space where, if we put our system without speed nor acceleration, it won't evolve through time.
There are stable and unstable fixpoints. If we slightly perturbate the system while it is stationary and on a stable fixpoint, it will vibrate around this point. If this fixpoint is unstable, the perturbation will grow across time and will result in a motion with a large amplitude.
To find the positions of the fixpoints, we will use their definition : we pose $\dot{\theta}=\ddot{\theta}=\dot{\varphi}=\ddot{\varphi}=0$. We now have to solve the following system of equations :
$$
\left \{
\begin{eqnarray*}
%
0&=&\cos\theta\sin\varphi\sin\alpha-\sin\theta\cos\alpha \\
%
0&=&\frac{\sin\theta\cos\varphi\sin\alpha}{\sin^2\theta+\beta}
\end{eqnarray*}
\right .
$$
The solutions for these equations are :
$$
\left \{
\begin{eqnarray*}
\theta&=& 0 \; \text{or} \; \pi \\
%
\varphi&=& 0
\end{eqnarray*}
\right .
\qquad \qquad
\text{and}
\qquad \qquad
\left \{
\begin{eqnarray*}
\theta&=& \pm \arccos ( \pm \cos \alpha ) \\
%
\varphi&=&\pm\frac{\pi}{2}
\end{eqnarray*}
\right .
$$
which can be drawn as follows :
fixed points for $\varphi=\pm\frac{\pi}{2}$ | fixed points for $\varphi=0$ |
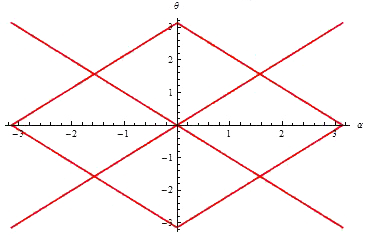 | 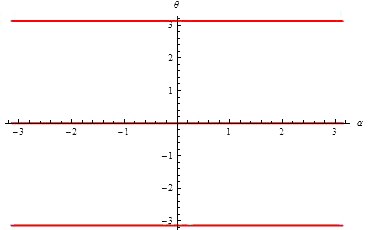 |
$$
\left \{
\begin{eqnarray*}
\theta&=& \pm\alpha \\
%
\varphi&=&\pm\frac{\pi}{2}
\end{eqnarray*}
\right . \quad ; \quad
\left \{
\begin{eqnarray*}
\theta&=& \pm (\pi - \alpha ) \\
%
\varphi&=&\pm\frac{\pi}{2}
\end{eqnarray*}
\right . (\alpha >0)\quad ; \quad
\left \{
\begin{eqnarray*}
\theta&=& \pm (\pi + \alpha ) \\
%
\varphi&=&\pm\frac{\pi}{2}
\end{eqnarray*}
\right . (\alpha <0)
$$ |
$$
\left \{
\begin{eqnarray*}
\theta&=& 0 \\
%
\varphi&=& 0
\end{eqnarray*}
\right . \quad ; \quad
\left \{
\begin{eqnarray*}
\theta&=& \pm \pi \\
%
\varphi&=& 0
\end{eqnarray*}
\right .
$$ |